
A new video from LimX Dynamics, a Chinese robotics company founded in 2022, showcases its full-size humanoid robot Oli performing a remarkable display of dexterity and autonomy.
In a short two-minute clip, the robot is seen locating, picking up, and placing tennis balls into a basket, all without any teleoperation or motion-capture data.
This demonstration highlights LimX Dynamics’ progress in embodied intelligence and autonomous motion while giving Oli a place in the list of highly agile and perceptive humanoid robots to look out for in the future.
A smooth display of perception and motion
The video opens with a simple but revealing test of perception. A person waves a tennis ball before the robot, and Oli’s head smoothly tracks the ball’s motion, demonstrating real-time visual awareness.
When the ball is dropped, Oli takes a few measured steps forward, adjusts its stance, and bends down to retrieve it. The person moves the ball further away, prompting Oli to get up, walk again, and pick up the ball. This sequence highlights its ability to adapt to new object positions dynamically.
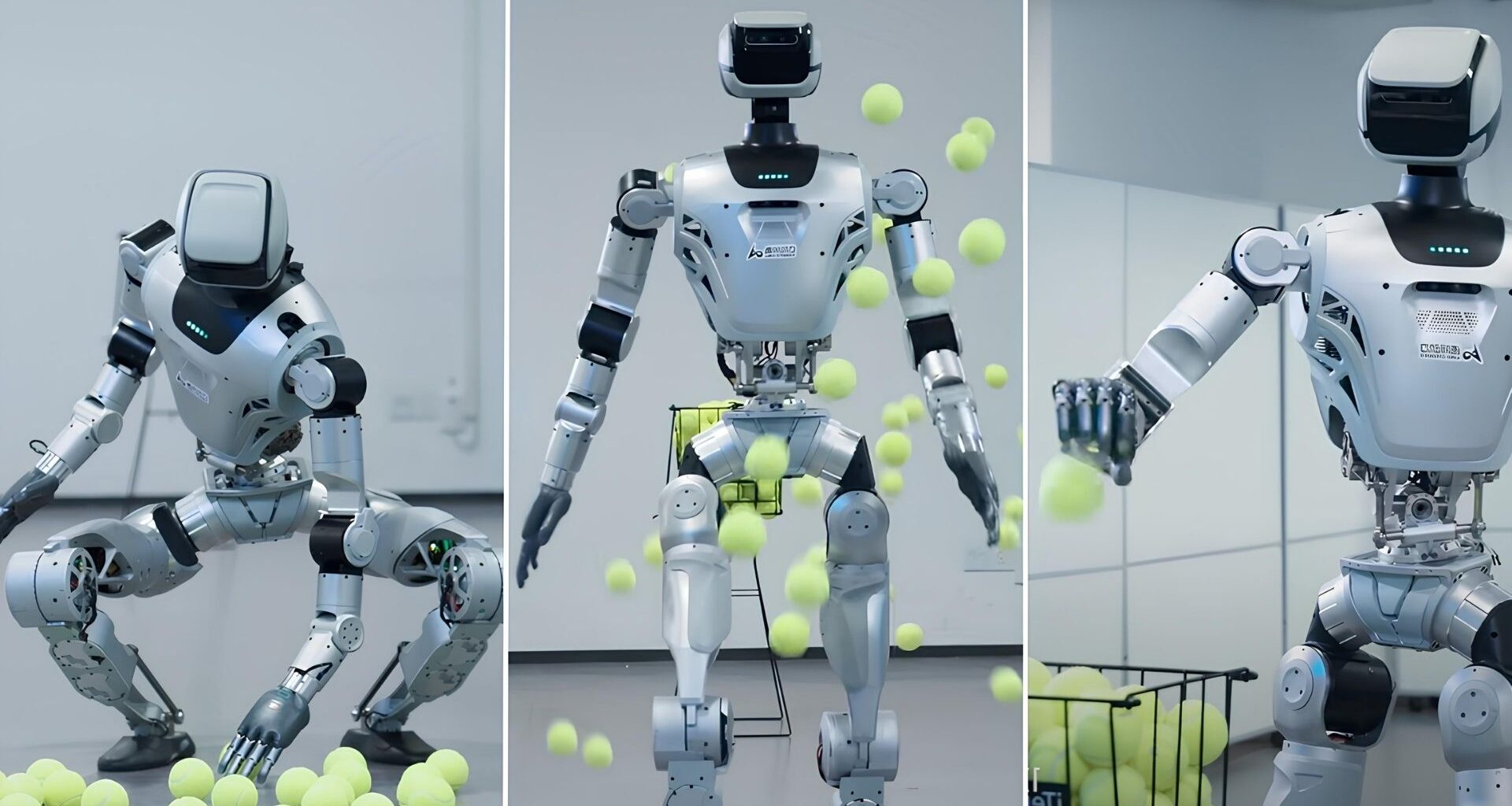
In the next scene, dozens of tennis balls are scattered across the floor. Oli systematically begins to pick them up, walking steadily between the basket and the floor, dropping the balls in the tennis ball hopper one by one, repeating the process with consistent precision. The robot’s gait remains balanced throughout, suggesting a well-integrated control system that handles both locomotion and manipulation simultaneously.
The video concludes with a cinematic shot of Oli walking toward the camera as tennis balls bounce around it in slow motion, a fitting end to a showcase of autonomous grace.
Inside Oli: Agile, modular, and perceptive
According to the company’s product page, Oli is a 165 cm-tall, 121 pounds (55 kg) humanoid robot with 31 degrees of freedom (DoF), supporting multiple end-effectors that enable it to perform tasks requiring fine motor control.
Its modular design allows fast disassembly and reconfiguration, a feature that supports rapid experimentation and customization in research and development environments.
Oli’s agility stems from LimX Dynamics’ engineering emphasis on “agile motion redefined,” achieved through a combination of high-fidelity sensors and robust motion planning algorithms. Each leg features six DoF, while the arms and waist contribute additional mobility, allowing Oli to perform fluid, human-like movements such as bending, reaching, and grasping with natural coordination.
For perception, the robot employs multi-sensor fusion integrating a 6-axis IMU, head-mounted and chest-mounted Intel RealSense D435i depth cameras, and external interfaces for additional sensors like LiDAR. These enable 3D spatial awareness and object recognition, which are critical for tasks like locating tennis balls in cluttered environments.
Connectivity and development support are also core to Oli’s design. The platform offers USB 3.0/3.2 ports, Ethernet (RJ45, 1000 Mbps), power interfaces, and a modular SDK that supports Python, NVIDIA Isaac Sim, MuJoCo, and Gazebo simulation platforms. Motion libraries are delivered via OTA updates, and developers are provided with manuals, case studies, and continuous integration support.
Embodied intelligence in action
LimX Dynamics describes its mission as “lowering the barrier to reinforcement learning” and advancing the embodied intelligence revolution. The tennis ball demonstration encapsulates this philosophy, while showing not a pre-programmed set of movements, but a closed-loop perception-action system that interprets its surroundings and acts accordingly.
In just two minutes, Oli demonstrates what the company calls “whole-body loco-manipulation,” a complex fusion of balance, motion, and object interaction that brings humanoid robotics one step closer to practical autonomy.