
Researchers at Shibaura Institute of Technology—specifically Associate Professor Takuya Otani from the Faculty of System Science and Engineering—Waseda University—led by Professor Atsuo Takanishi from the Faculty of Science and Engineering—and Fujitsu Limited—including Nobuyuki Hara, Yutaka Takita, and Koichi Kimura—have developed a quantum computing method for optimizing robot posture control. Published in Scientific Reports (DOI:10.1038/s41598-025-12109-0) on August 25, 2025, the approach utilizes qubit-based position representation and quantum entanglement to reduce computational load, achieving up to a 43% error reduction in simulations and enabling calculations for a 17-joint full-body robot model in approximately 30 minutes; the team demonstrated the method using Fujitsu’s quantum simulator and a 64-qubit quantum computer jointly developed by RIKEN and Fujitsu.
Quantum Computing Advances Robot Control
Researchers at Shibaura Institute of Technology, Waseda University, and Fujitsu Limited have jointly developed a novel method for robot posture optimisation utilising quantum computing technology, announced on August 25, 2025. This approach facilitates efficient calculation of inverse kinematics – determining joint angles from a target end-effector position – by employing qubit-based position representation and quantum entanglement, thereby enabling smoother, more complex movements for next-generation robots. Verification using Fujitsu’s quantum simulator demonstrated up to a 43% error reduction with fewer calculations compared to conventional methods.
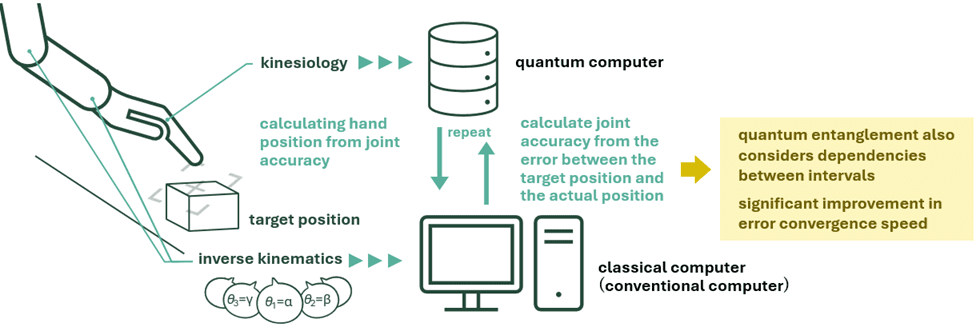
The research team represented the orientation and position of each robot link as a qubit, and carried out forward kinematics – calculating end-effector position from joint angles – using quantum circuits. Inverse kinematics calculations were performed on classical computers, achieving efficient posture control through a hybrid quantum-classical approach. By replicating the structural influence of parent joint movements on child joints through quantum entanglement, the number of necessary calculations was significantly reduced compared to classical methods.
A trial calculation indicated that motion calculations for a full-body multi-joint model with 17 joints, equivalent to the number of joints in the human body, can be executed in approximately 30 minutes using this method. This method can express the posture of multi-joint robots with a small number of qubits, making it implementable even in current noise intermediate-scale quantum (NISQ) computers.
The research, detailed in a paper titled “Quantum computation for robot posture optimization” authored by Takuya Otani of Shibaura Institute of Technology, Atsuo Takanishi of Waseda University, and Nobuyuki Hara, Yutaka Takita, and Koichi Kimura of Fujitsu Limited, was published in Scientific Reports, part of Nature Portfolio, with DOI: 10.1038/s41598-025-12109-0. Potential applications of this technology include real-time control of humanoid robots and multi-joint manipulators, obstacle avoidance, and energy optimisation.
Enhanced Posture Calculation Through Quantum Entanglement
Verification using Fujitsu’s quantum simulator achieved up to a 43% error reduction with fewer calculations compared to conventional methods, according to the research published on August 25, 2025. The effectiveness of quantum entanglement was also confirmed through an experiment carried out on the 64-qubit quantum computer jointly developed by RIKEN and Fujitsu Limited.
This development allows for the expression of multi-joint robot posture with a small number of qubits, making it implementable even in current noise intermediate-scale quantum (NISQ) computers. Further performance improvements are anticipated through combination with advanced quantum algorithms such as quantum Fourier transform, as detailed in the published research.
Applications for Humanoid and Multi-Joint Robots
The research team, comprised of Takuya Otani of Shibaura Institute of Technology, Atsuo Takanishi of Waseda University, and Nobuyuki Hara, Yutaka Takita, and Koichi Kimura of Fujitsu Limited, demonstrated that by expressing the orientation and position of each robot link as a qubit, and replicating the structural influence of parent joint movements on child joints through quantum entanglement, the number of necessary calculations was significantly reduced compared to conventional classical methods. This approach facilitates efficient posture control through a hybrid quantum-classical methodology, where forward kinematics is carried out using quantum circuits and inverse kinematics calculations are performed on classical computers.
The effectiveness of quantum entanglement was confirmed through an experiment conducted on the 64-qubit quantum computer jointly developed by RIKEN and Fujitsu Limited, and verification using Fujitsu’s quantum simulator achieved up to a 43% error reduction with fewer calculations compared to conventional methods, as reported on August 25, 2025. Further performance improvements are anticipated through combination with advanced quantum algorithms such as quantum Fourier transform, as detailed in the published research in Scientific Reports, part of Nature Portfolio.
Institutional Backgrounds and Research Details
The research, detailed in a paper titled “Quantum computation for robot posture optimization” published in Scientific Reports, Nature Portfolio, was authored by Takuya Otani of Shibaura Institute of Technology, Atsuo Takanishi of Waseda University, and Nobuyuki Hara, Yutaka Takita, and Koichi Kimura of Fujitsu Limited. The DOI for the publication is 10.1038/s41598-025-12109-0.
Shibaura Institute of Technology, a private university with campuses in Tokyo and Saitama, was established in 1927 and selected for the Top Global University Project sponsored by the Ministry of Education, Culture, Sports, Science and Technology, receiving support for ten years starting in the 2014 academic year. The institution currently has over 9,500 students.
Waseda University, founded in 1882, operates with the principles of Independence of Scholarship, Practical Application of Scholarship, and the Fostering of Good Citizens, and comprises 10 faculties including undergraduate departments, graduate schools, and professional graduate schools. The university aims to contribute to humankind globally by 2050, approaching its 150th anniversary in 2032.
Fujitsu Limited reported consolidated revenues of 3.6 trillion yen (US$23 billion) for the fiscal year ended March 31, 2025, and employs 113,000 people. The company focuses on five key technologies: AI, Computing, Networks, Data & Security, and Converging Technologies, with a purpose to make the world more sustainable by building trust in society through innovation.