
Researchers at the University of Genoa in Italy have developed a lightweight crawling robot designed to navigate tight pipes and debris-filled spaces.
Called Porcospino Flex, the 670-mm-long robot weighs just 7.9 pounds (3.6 kilograms) and takes inspiration from the segmented bodies of millipedes and the spines of porcupines.
Its unique design allows the robot to absorb impacts and maneuver passively, without additional motors, during inspections in hazardous industrial environments and confined infrastructure networks.
In December 2025, a series of videos by researcher Logan Olson showed a humanoid robot dropping to all fours and crawling at an unsettling speed, reviving debate over humanoids.
Nature-inspired rover
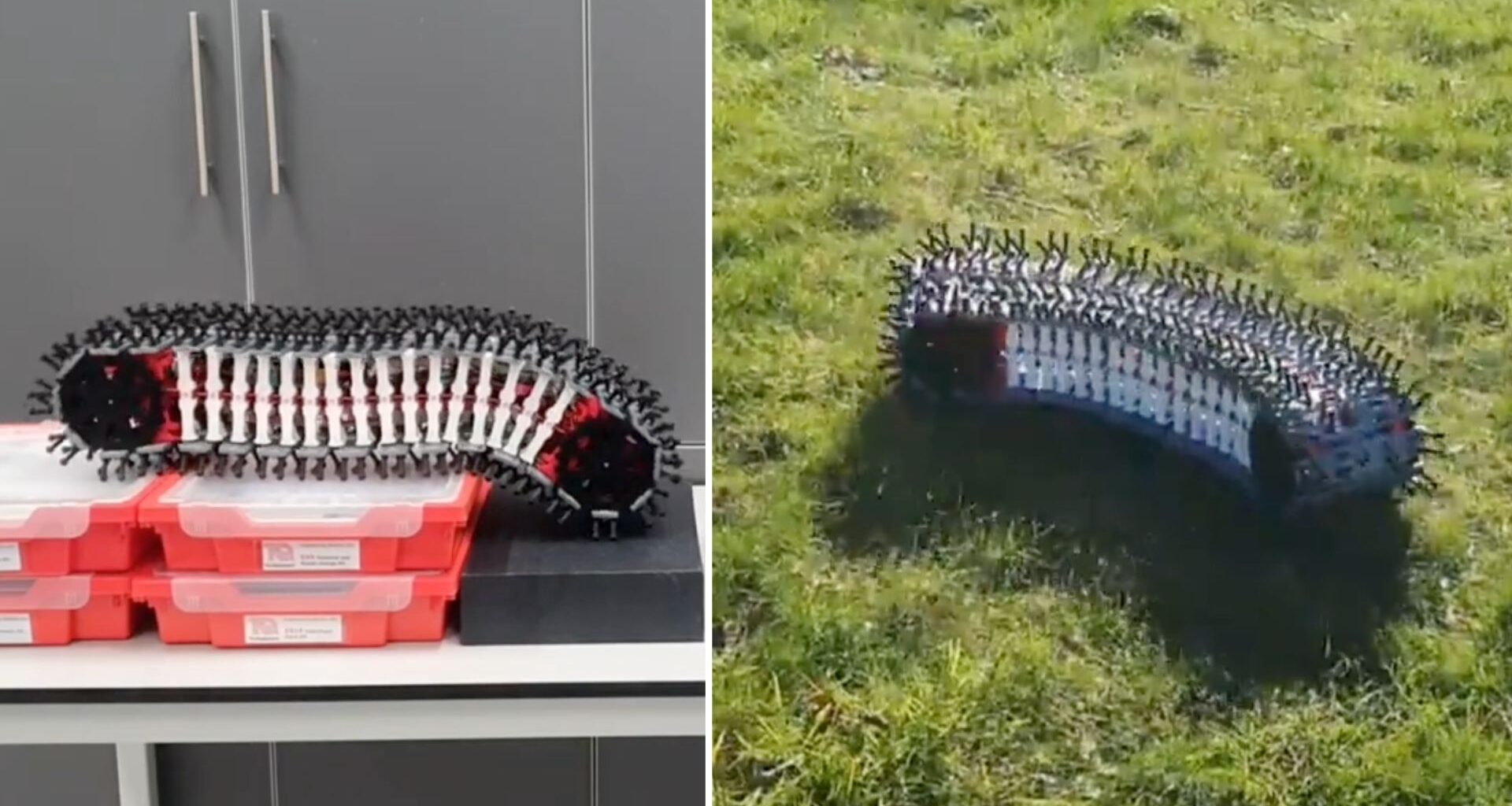
Porcospino Flex is a compact, crawling robot designed to navigate narrow, cluttered spaces where traditional machines struggle. It measures 670 mm in length, 165 mm in width, and 145 mm in height, and weighs just 7.9 pounds (3.6 kilograms), making it light and easy to deploy.
The research team behind the robot took inspiration from nature, particularly the flexible, segmented bodies of millipedes and the defensive spines of porcupines.
This bio-inspired approach enables the robot to inspect tight pipes, damaged infrastructure, and debris-filled environments, according to Techeblog.
At the heart of the design is a flexible spine made from thermoplastic polyurethane, produced as a single 3D-printed piece.
The spine is 440 mm long and includes an internal lattice structure that reduces weight while maintaining strength. Along the spine are 15 small grooves that allow the body to bend left or right by up to 120 degrees.
This flexibility does not require additional motors, allowing the robot to absorb impacts and adapt its shape when encountering obstacles naturally.
The robot’s end sections are made from a tougher material and house the key electronic components. These include motors, batteries, control drivers, and a Raspberry Pi 4 computer that manages movement and operation.
In total, the system uses four gear motors: two drive the robot forward along a surface, while the other two pull internal ropes that control bending. Together, these features give Porcospino Flex a simple, efficient design well-suited for inspection tasks in confined, unpredictable spaces, reports Techeblog.
Flexible inspection robot
Porcospino Flex uses a track lined with broad spines that help it grip loose soil, grass, and the edges of obstacles. In testing, the robot has demonstrated strong climbing ability, repeatedly scaling 70 mm steps and handling bumps on asphalt.
The spines also allow it to pull itself over ledges by maintaining a firm grip. Cameras mounted at each end provide live views of confined spaces, updating several times per second as the robot moves at roughly 0.1 meters per second.
According to the team, the prototype is currently undergoing experimental trials and is operated remotely via radio control. These tests evaluate the mechanical design and the robot’s ability to traverse uneven terrain by naturally adapting its shape through passive bending and twisting of its flexible spine.
Trials include climbing single and double steps, maneuvering across grass—one of the most challenging surfaces due to spine interaction—and overcoming sidewalk edges on asphalt.
Compared with earlier versions, Porcospino Flex is lighter and more energy efficient, with power consumption reduced by around 15 percent while maintaining stable acceleration.
The improved performance is largely due to a redesigned continuous main body and a shift to a thermoplastic polyurethane spine, replacing the previous ABS structure.
This change improves durability, flexibility, and reliability. Enhanced track guidance, achieved through redesigned supports and pegs, further improves steering. Together, these refinements give Porcospino Flex greater maneuverability, efficiency, and robustness for operation in complex, real-world environments.