
Researchers have demonstrated that a chain-like robotic metamaterial can learn to change its shape, store multiple forms, and switch between them without a central controller.
That finding places learning directly into physical matter, opening the possibility of machines that adapt by altering their own structure rather than following fixed instructions.
First learned moves

On a low-friction table, the chain bent itself into learned shapes and returned to them when the same input was applied.
By tracking those changes, Yao Du at the University of Amsterdam (UvA) showed that each unit adjusted its local behavior based on shared information from neighboring hinges.
Instead of following a fixed program, the connected joints stored past motion and updated how they resisted bending, allowing the material to refine its response over time.
That ability to store, revise, and reuse learned shapes sets the stage for more complex behaviors beyond simple form changes.
How the hinges learn
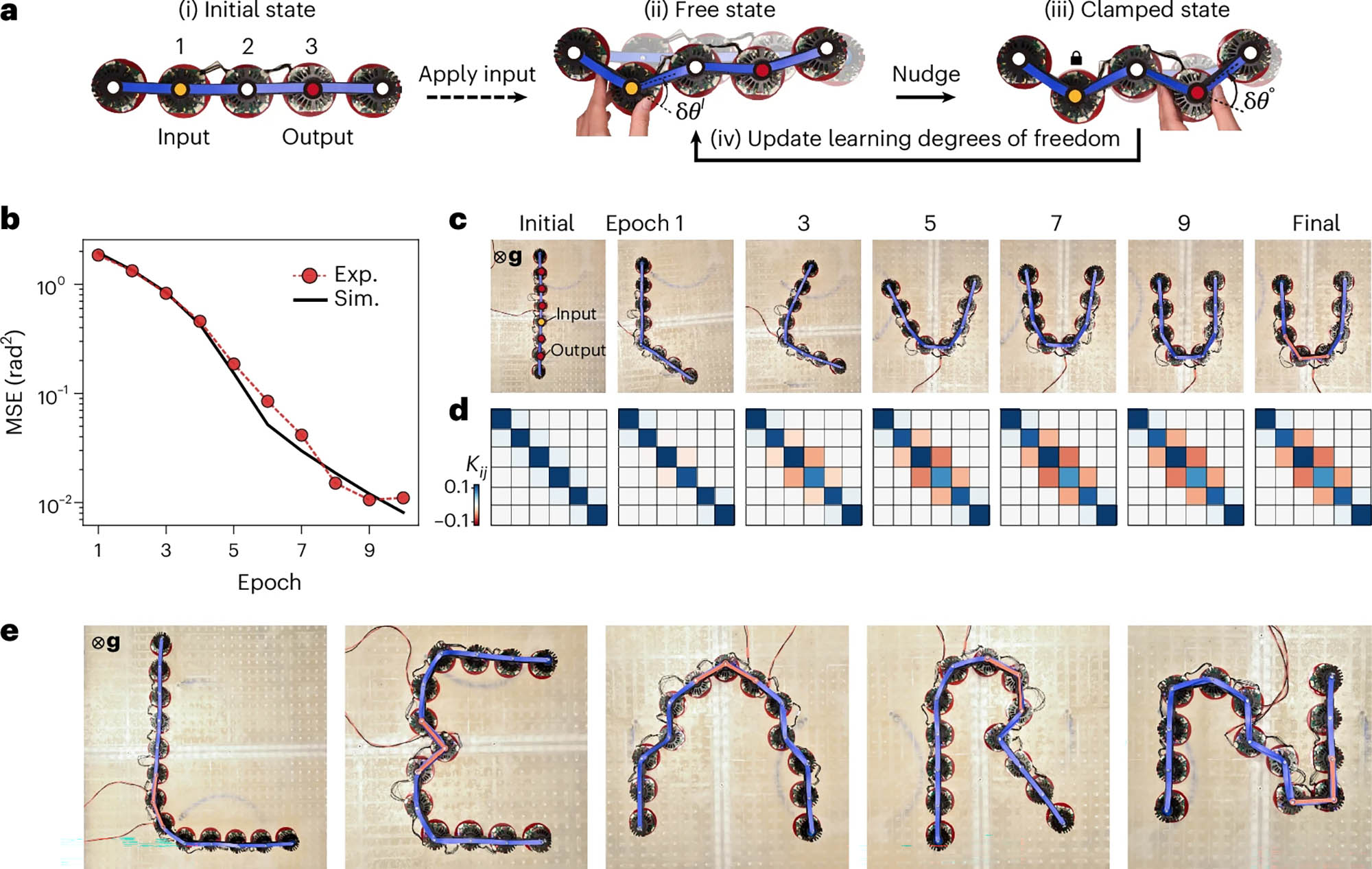
Each hinge carried a microcontroller, a tiny computer on the joint, and local memory replaced the need for a central brain.
When one part rotated, the device measured the angle, compared free and held positions, and changed the torque it applied.
Because every unit talked only to neighbors, it could update stiffness, the material’s resistance to bending, without centralized control.
That simplicity mattered because large materials cannot wait for one processor to calculate every bend before anything moves.
Memory that resets
Training did not freeze the metamaterial, an engineered structure built for unusual behavior, into one pose, where many shape-changing materials stop.
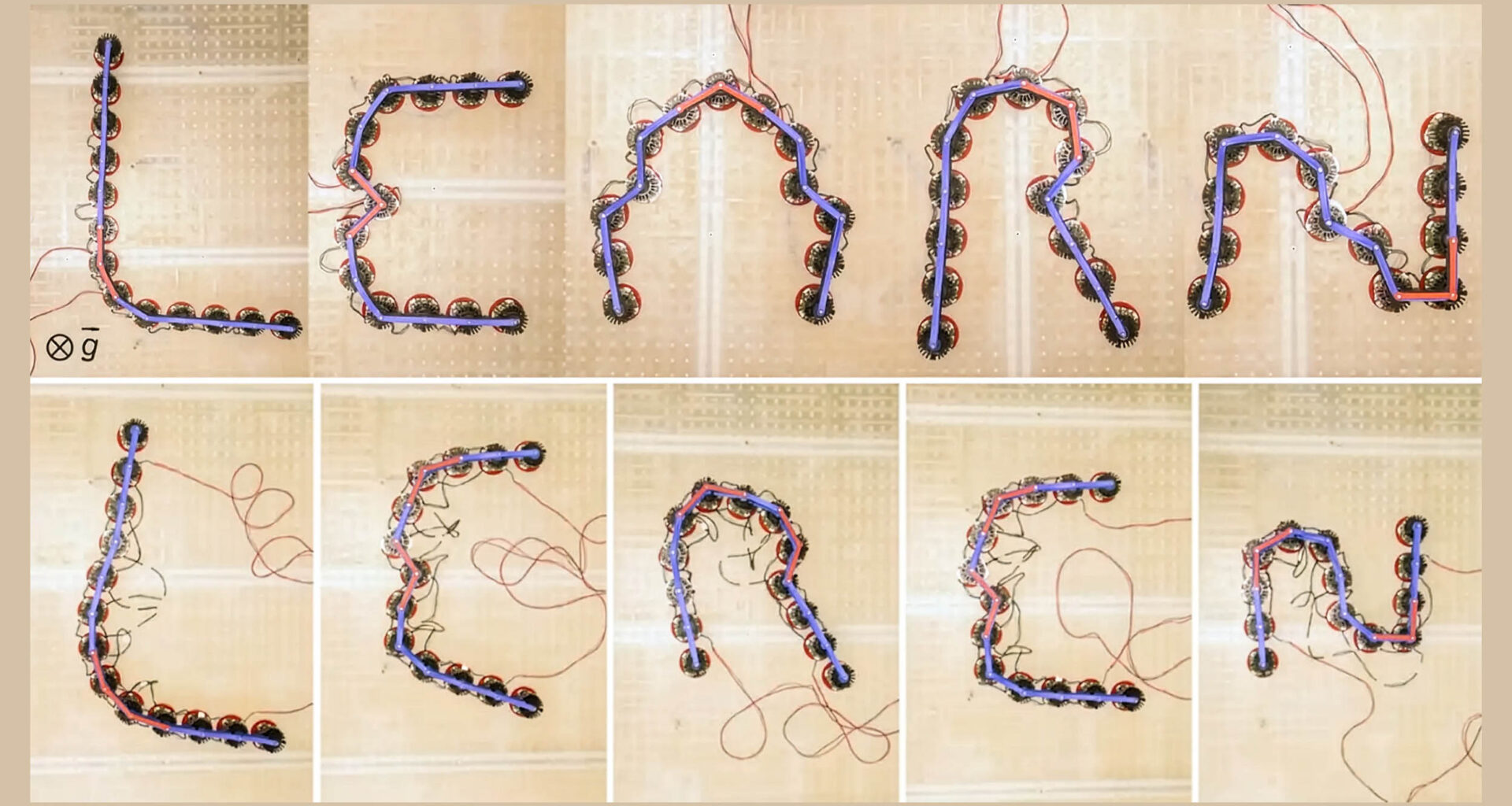
After learning a U shape and then forming each letter in the word LEARN one by one, the 11-unit chain replaced earlier responses without needing a full reset.
“The most exciting observation of our research was that learning gives our metamaterials the ability to evolve – once the system starts to learn, the possibilities of where it ends up feel almost limitless,” said Du.
Once memory became editable, the next challenge was keeping several learned responses available at the same time.
When pushes differ
Learning several responses at once forced the team to deal with non-reciprocal behavior, where direction changes the result.
A push near one end could make a distant hinge curve one way, while the reverse push produced another answer.
With that asymmetry, the chain learned several targets in sequence during each round instead of averaging them away.
That move turned training from one memory at a time into several available actions for the same material.
 Contrastive learning for shape-changing metamaterials. Credit: Nature Physics. Click image to enlarge.Scaling the chain
Contrastive learning for shape-changing metamaterials. Credit: Nature Physics. Click image to enlarge.Scaling the chain
Bigger chains posed a harder test because a bend at one spot weakens as it travels through ordinary elastic material.
Even so, larger versions still learned complex shapes, including a small chain that formed a cat when given simple inputs.
The team helped long chains by allowing farther-apart parts to influence one another, so information did not fade too quickly.
That result suggested these materials can scale beyond simple demonstrations, even if larger versions learn more slowly.
Earlier active solids from the same lab could already roll and crawl over messy ground.
Related mechanical networks have already learned tasks through local updates, showing that hardware can train itself.
The new system combines those ideas by bringing motion, memory, and learning into one body. That makes adaptation part of the structure itself, not a separate controller running above it.
Several resting shapes
While playing with the chain, the researchers found multistable behavior, meaning the material could settle into several resting shapes.
Local settings tipped one flat pose into instability, so the system amplified a bend until a new balance formed.
With one unstable mode in the right place, a trained pair of shapes could snap between states and hold the result.
That discovery set up the material’s most robot-like tricks, because stored shapes could now trigger fast actions.
Grabs and crawls
One trained chain became a reflex gripper that caught objects on contact and let go when another unit was pushed.
Another version, driven at a single joint, cycled through stable shapes and turned that sequence into forward motion.
Only the asymmetric system kept that gait, because the direction-dependent forces biased the pathway between one pose and the next.
For now those moves remain simple, but they show learning can produce behavior, not just geometry.
The next goal is teaching the material full sequences, such as switching between crawling and rolling.
Du explained that the team wants the material to learn how to handle time and uncertainty, so it can adapt when signals get noisy.
That push would move the project closer to living tissues and organisms, which keep adjusting while the world changes.
It would test whether these materials can stay useful outside lab training, where friction, variation, and mistakes pile up.
The work suggests learning does not have to sit above matter as software, because matter can now store and update behavior.
If engineers can make these systems faster, sturdier, and three-dimensional, the boundary between material and machine may keep shrinking.
The study is published in Nature Physics.
—–
Like what you read? Subscribe to our newsletter for engaging articles, exclusive content, and the latest updates.
Check us out on EarthSnap, a free app brought to you by Eric Ralls and Earth.com.
—–