

What are the key challenges to lunar radionavigation, and how can they be addressed?
KEIDAI IIYAMA, SAM PULLEN AND GRACE GAO, STANFORD UNIVERSITY
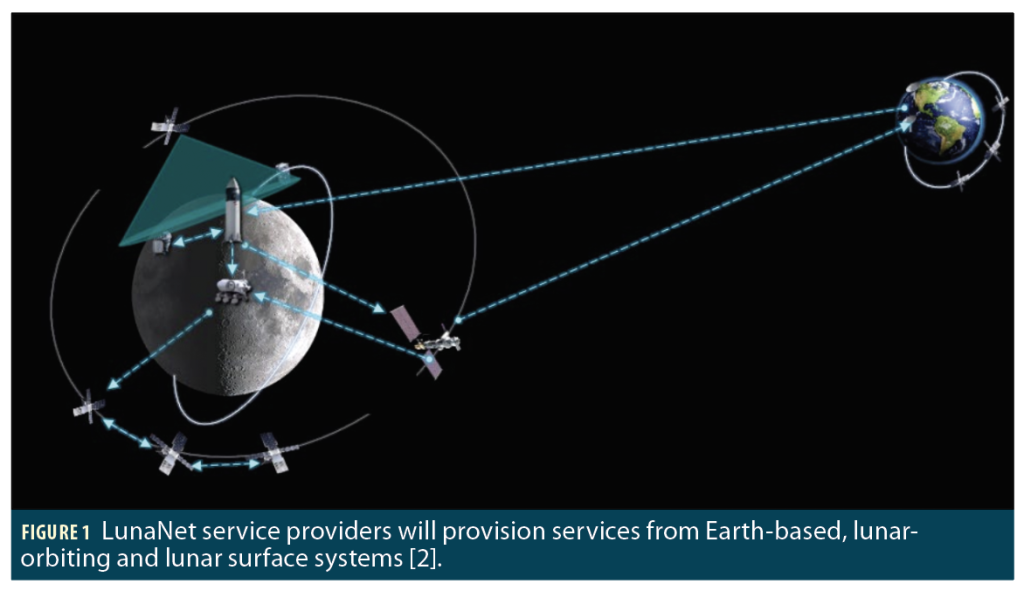
Interest in establishing a sustainable human presence on the Moon has grown significantly in the last 20 years, with more than 200 missions planned over the next decade. To support these activities, robust positioning, navigation and timing (PNT) services are essential both on the lunar surface and in orbit. NASA and its international partners are developing a “network of networks” known as LunaNet designed to provide communications, PNT, detection and science services across the lunar environment [1].
This article reviews current proposals for LunaNet and its international partners: Moonlight (ESA) and LNSS (JAXA). It examines the technical challenges faced by lunar PNT and highlights emerging solutions from Stanford’s Navigation and Autonomous Vehicles (NAV) Lab, including orbit determination and time synchronization (ODTS) algorithms, spreading code design, differential carrier-phase techniques, rover navigation, and autonomous fault monitoring.
LunaNet PNT Services
LunaNet envisions two classes of PNT services:
• Point-to-Point (P2P) Navigation, which delivers PNT through direct communication links between a provider and user.
• Lunar Augmented Navigation Service (LANS), which broadcasts navigation signals—augmented forward signals (AFS)—to lunar users. LANS is the lunar counterpart to terrestrial GNSS.
To provide these services, a lunar system must overcome fundamental challenges in constellation design, ODTS, and navigation message definition.
Key Challenges in Lunar PNT
Lunar PNT systems must address several unique challenges compared with terrestrial GNSS:
Orbital Dynamics and Satellite Geometry
Terrestrial GNSS relies on circular orbits that provide stable, global coverage. Around the Moon, however, strong third-body perturbations from Earth destabilize most circular orbits, requiring frequent station-keeping. Early deployments will also prioritize coverage of the lunar South Pole. Elliptical Lunar Frozen Orbits (ELFOs), which offer long-term stability under three-body perturbations and continuous South Pole visibility, are strong candidates for navigation satellites.
Satellite Orbit Determination and Time Synchronization (ODTS)
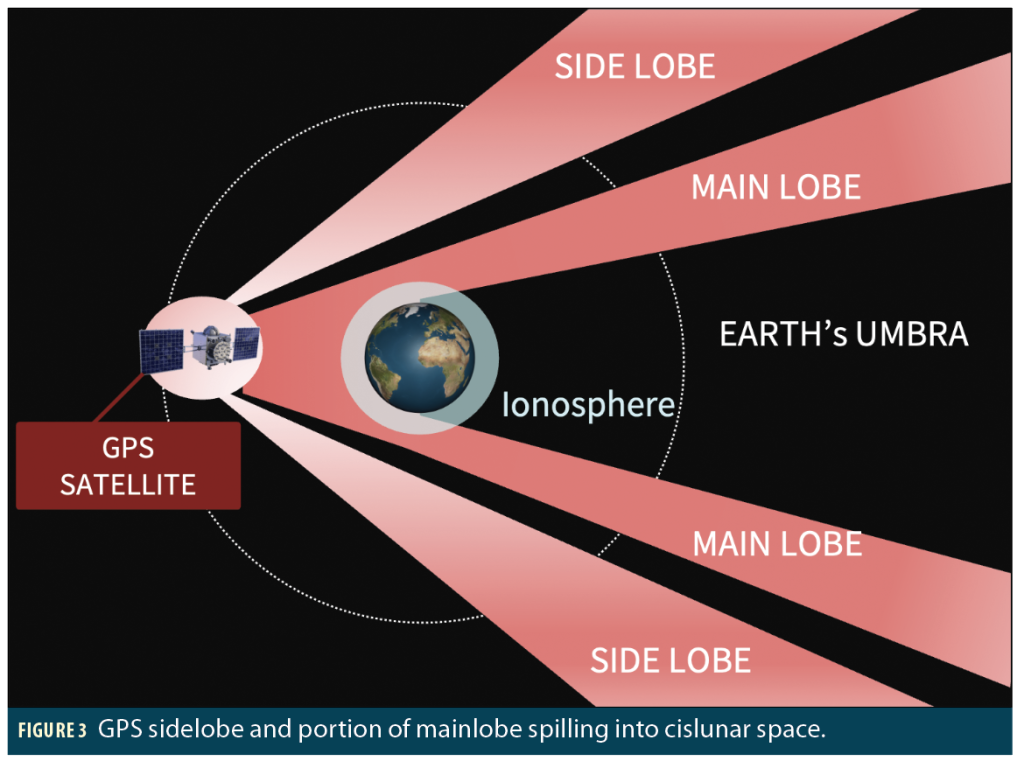
Accurate ODTS is essential for LANS, as errors directly propagate into user equivalent range error (UERE). Current requirements specify 40 m (95%) for position and 10 mm/s (95%) for velocity. Terrestrial GNSS achieves ODTS using ground monitoring stations distributed worldwide, but establishing an equivalent network on the Moon is prohibitively expensive in the early stages of LunaNet. Alternative frameworks must therefore rely on Earth-based ground stations or onboard ODTS approaches (e.g., exploiting GNSS sidelobe signals).
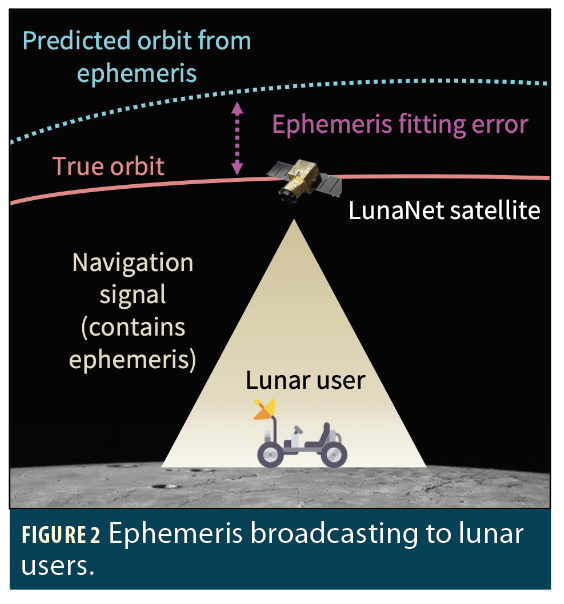
Ephemeris Message Definition
Navigation satellites broadcast orbital parameters (ephemerides) that allow users to compute satellite positions at any desired epochs. Terrestrial GNSS ephemerides are based on Keplerian elements with harmonic corrections. For lunar orbits, however, more appropriate parameterizations are required to accurately capture elliptical, perturbed trajectories while minimizing ephemeris message size.
Reference Frames and Time Scales
Terrestrial GNSS is referenced to Earth’s geoid and GPS time. Lunar PNT requires definitions of both a geodetic reference frame and a standard time scale. Two frames are currently in use—the Mean Earth (ME) frame and the Principal Axis (PA) frame—but a single standard must be adopted or a new one established. For time reference, LunaNet proposes to define LunaNet Reference Time (LRT), aligned with the AFS signals, which will link to Coordinated Lunar Time (LTC) referenced to the lunar geoid.
Operation and Integrity Monitoring
Navigation services for safety-critical applications, such as lunar landings and human surface operations, require robust integrity monitoring. As with terrestrial GNSS, signal quality can degrade due to satellite clock drift, unflagged maneuvers, payload failures, or code–carrier incoherence. These anomalies may be detected at surface monitoring stations, onboard satellites, or by receivers using Receiver Autonomous Integrity Monitoring (RAIM). However, in the near term, lunar systems will face limited surface stations and sparse satellite visibility, complicating the application of existing integrity monitoring methods.
Receiver-Side Algorithms
Receivers must also adapt to lunar constraints. With only one or two satellites visible during early deployments, rovers cannot rely on standard snapshot solutions requiring four or more signals. Instead, receiver algorithms must integrate navigation signals with onboard sensors (e.g., IMUs, cameras) to achieve reliable localization.
Satellite Navigation Systems under Development: LCRNS (NASA), LCNS (ESA) and LNSS (JAXA)
Lunar navigation capability is being advanced in parallel by NASA, ESA and JAXA. Each agency is preparing to deploy satellites broadcasting Augmented Forward Signals (AFS) in support of the LANS. NASA’s Lunar Communication Relay and Navigation System (LCRNS), ESA’s Lunar Communications and Navigation System (LCNS) under the Moonlight program, and JAXA’s Lunar Navigation Satellite System (LNSS) will serve as the first AFS providers under the LunaNet framework.
To ensure interoperability, the agencies are coordinating through the LunaNet Interoperability Specification (LNIS), which defines common standards for service interfaces, navigation messages, and time references. The most recent update, LNIS Version 5, establishes the baseline requirements for interoperable lunar PNT services [2].
Satellite Orbits: Initial Focus on Lunar South Pole
The first operational service volume targets latitudes south of 70° up to an altitude of 200 km, reflecting the high-priority needs of lunar South Pole missions. To minimize satellite numbers while maintaining coverage and long-term orbital stability, LCRNS and LNSS plan to deploy spacecraft in elliptical lunar frozen orbits (ELFOs). ESA’s first Moonlight satellite, Lunar Pathfinder, will also be positioned in ELFO to provide early relay and navigation services.
Assets for Operation
Each agency is developing supporting infrastructure for orbit determination (OD), time synchronization (TS), and system operation:
NASA (LCRNS):
LCRNS satellites will carry the LCRNS PNT Instrument (LPI), consisting of a GPS receiver, stable clock, and an onboard ODTS filter that estimates position, velocity and clock offset. In May, the LuGRE mission successfully demonstrated the tracking of GPS and Galileo signals in lunar orbit and on the lunar surface. NASA also plans to establish three Lunar Earth Ground Stations (LEGS) at White Sands Missile Range (WSMR) in the U.S., South Africa and Western Australia, enabling direct-to-Earth communication. With pseudorandom noise ranging and 1-/2-way X-band Doppler tracking, LEGS will support both user services and ODTS of lunar satellites.
ESA (LCNS):
ESA has proposed ATLAS (Advanced Tracking and Location Architecture for the Moon), a dedicated tracking and timing network that integrates ground and potential lunar assets. ATLAS aims to deliver orbit and clock accuracy at the tens-of-meters and nanosecond levels, respectively. ESA also plans NOVAMOON, a differential reference station near the lunar South Pole, designed to provide decimeter-level accuracy across the region. Equipped with a Mini-RAFS clock and laser retroreflector, NOVAMOON will also serve as a lunar time and geodetic reference.
JAXA (LNSS):
JAXA plans to leverage GNSS sidelobe signals for orbit determination and synchronization, reducing ground dependency and enabling autonomous navigation in cislunar space.
Signal Design
According to the LunaNet Signal-in-Space Standard (LSIS) [3], the AFS will be broadcast at 2,492.028 MHz (2,436 times the GPS L1 C/A-code signal chipping rate), harmonized with legacy GNSS frequencies. The AFS comprises two channels:
In-phase (I) channel: A 1.023 Mcps Gold-coded BPSK sequence of length 2046, carrying data for low-complexity access. Compared with GPS C/A code, it offers an acquisition gain of ~3 dB and a tracking gain of ~1 dB.
Quadrature (Q) channel: A 5.115 Mcps BPSK pilot (no data) using a Weil sequence of length 10,230, optimized for high-precision tracking and applications such as lunar landing and surface navigation.
The navigation message uses a 250-bps data rate (5 × GPS C/A) with 1,200-bit blocks (4 × GPS C/A), providing greater flexibility for future integrity and safety-of-life services and supporting diverse lunar ephemeris representations.
Research Efforts at the Stanford NAV Lab
Lunar PNT is an active research area across many groups in academia, government and industry. Here, we focus on our ongoing research at the Stanford NAV Lab led by Prof. Grace Gao.
ODTS
NAV Lab has investigated time transfer and orbit determination algorithms for lunar navigation satellites using GNSS sidelobe signals. These signals offer a way to reduce reliance on terrestrial ground stations, but their performance is limited by (1) poor geometry (signals arriving from nearly the same direction), (2) unmodeled biases from Earth’s ionosphere and plasmasphere, and (3) large thermal noise on pseudorange measurements. To overcome these challenges, NAV Lab has pursued the following research directions:
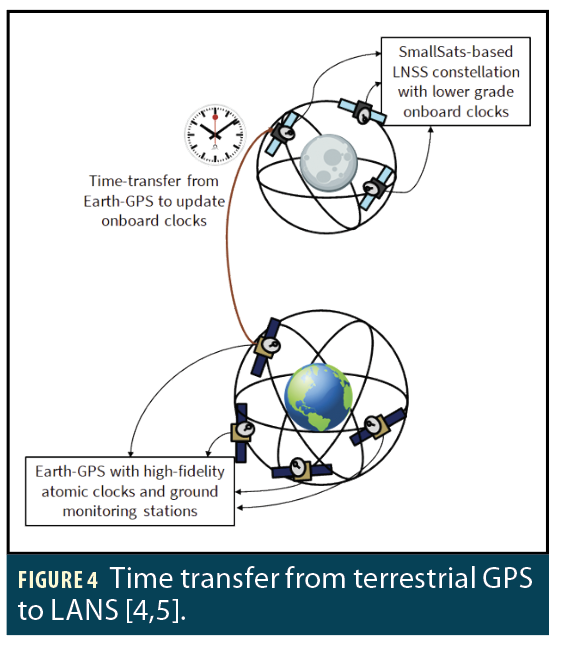
• Feasibility study of using GNSS signals: Bhamidipati et al. first showed it is feasible to use GNSS signals for lunar satellite time transfer by developing a timing filter to correct clock estimates via intermittently available terrestrial-GPS signals [4]. She then performed case studies to analyze trade-offs among various grades of clocks and lunar orbits [5]. This enabled her to conceptualize the design of a SmallSat-based Lunar Navigation and Communication Satellite System (LNCSS) with GPS time-transfer that provides navigation and communication services near the lunar South Pole [6].
• Time-differential carrier phase (TDCP): TDCP measurements can cancel most slowly varying delays and provide millimeter-level range-rate accuracy. Iiyama et al. demonstrated that, by jointly processing pseudorange and TDCP with adaptive state noise compensation and a cycle slip detector, significant performance improvements were achieved [7].
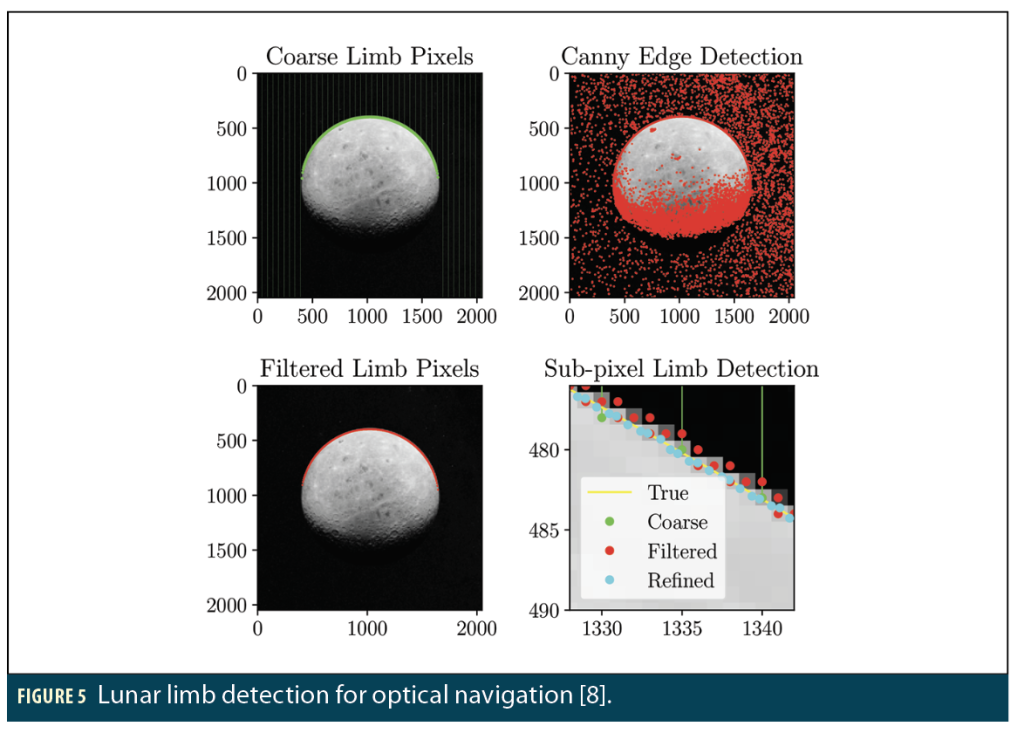
• Sensor fusion with complementary measurements: Vila et al. investigated fusing GNSS sidelobe signals with inter-satellite ranging and optical navigation (horizon detection from onboard cameras). This diversifies measurement geometry and reduces dilution of precision [8].
• Modeling ionospheric and plasmaspheric delays: Iiyama et al. analyzed GNSS signal delays in lunar orbit using the Global Core Plasma Model (GCPM). Results show that main-lobe signals grazing Earth’s ionosphere (tangential altitudes below ~1,000 km) can experience delays up to 100 to 200 m, highlighting the importance of bias mitigation [9].
Ephemeris Design
Ephemeris parameterization for lunar navigation satellites must strike a balance between high-accuracy orbital representation and compact message size. The latest LSIS requirements specify 40 m (95%) position accuracy and 10 mm/s (95%) velocity accuracy, with about 900 bits available for ephemeris data in each navigation frame.
We presented one of the earliest studies on ephemeris parameterization for lunar orbits (ELFO and LLO), proposing Chebyshev polynomial representations [10]. By tuning the polynomial degree, the trade-off between fitting accuracy and message size can be optimized. The study showed feasible representations covering more than half an ELFO orbital period exist, particularly near apoapsis, making Chebyshev polynomials a strong candidate for operational ephemeris encoding.
Spreading Code Design
We developed efficient methods for designing families of binary spreading codes [11]. We cast code design as minimizing a convex function of the codes’ auto- and cross-correlation values, subject to constraints. We propose a bit-flip descent algorithm capable of quickly finding codes with good correlation properties. We also show the problem of optimizing over subsets of code entries while keeping others fixed can be formulated as a mixed-integer program. This approach enables block coordinate descent methods that can, in each iteration, simultaneously optimize over tens of code entries more quickly than brute force search.
We also extended this approach to account for Doppler effects by optimizing an expected objective over a continuous frequency distribution. We evaluated our methods on examples that include Lunar ELFO constellations. Our methods matched or exceeded more sophisticated baselines, including natural evolution strategies, genetic algorithms, and classical Gold/Weil codes.
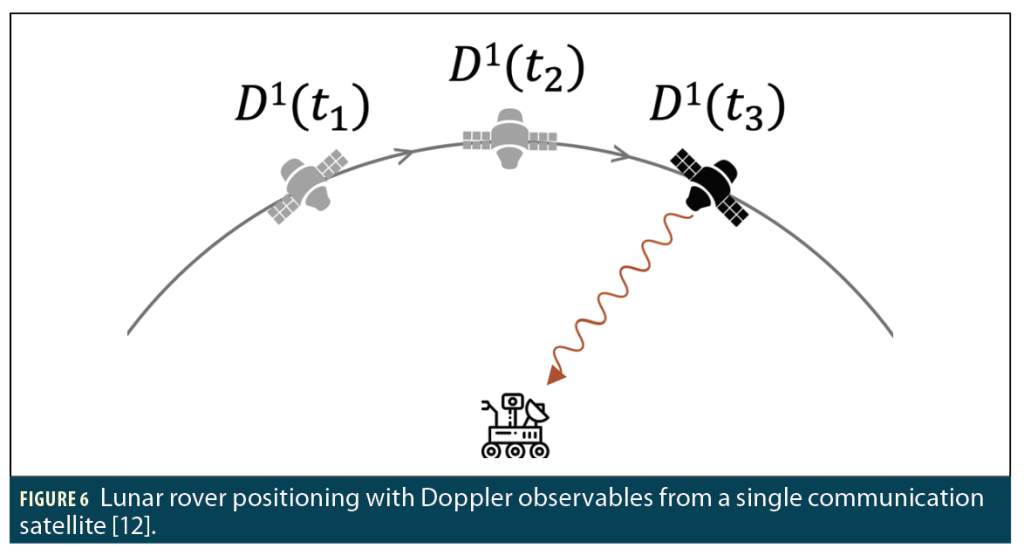
Single-Satellite Doppler-Based Positioning (Endurance Mission)
For missions preceding full deployment of LANS AFS, alternative navigation strategies are required. One case is NASA’s Endurance rover, which will traverse ~2,000 km across the lunar far side. Coimbra et al. investigated rover localization by opportunistically exploiting Doppler shifts from the Lunar Pathfinder’s communication downlink, despite the spacecraft lacking a dedicated navigation payload [12]. Results showed that with Doppler-only navigation, the Endurance rover can achieve sub-10 m average positioning accuracy (when stationary) within two orbital periods of Lunar Pathfinder, providing a promising solution for early surface missions.
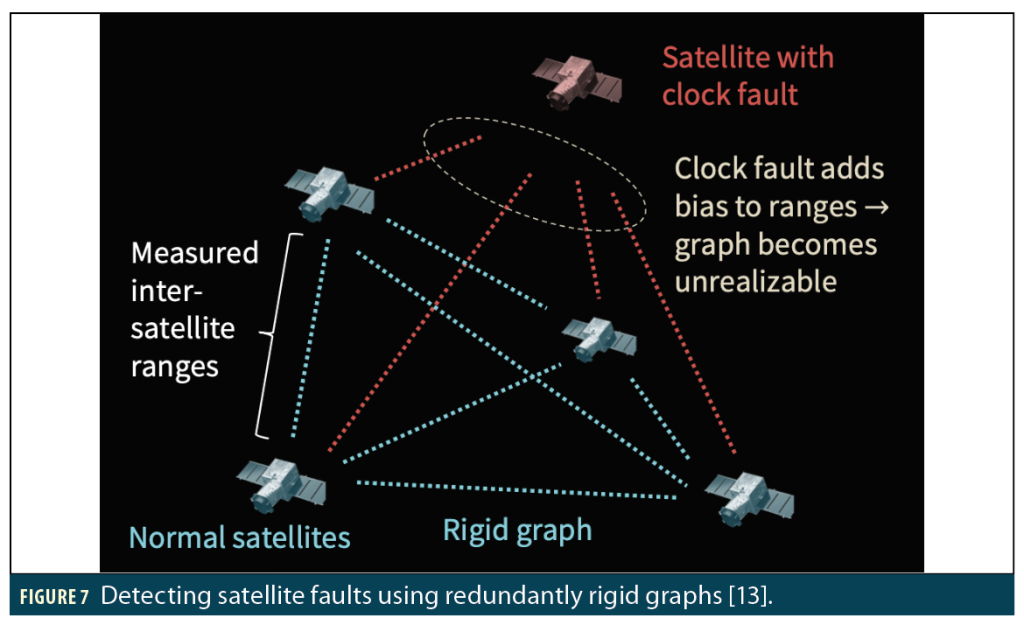
Clock Fault Detection Using Rigid Graphs
Integrity monitoring is critical for lunar navigation systems, which must detect and exclude faulty satellites. In [13], NAV Lab designed a clock fault detection algorithm using inter-satellite ranging, independent of prior ephemeris or lunar surface monitoring (both of which may be unavailable in early deployments). The method models the constellation as a graph, where satellites are vertices and inter-satellite links are edges. A malfunctioning onboard clock’s phase jump introduces range biases that make the graph unrealizable in 3D space. By searching for redundantly rigid subgraphs (rigid even after removing any vertex) and evaluating the singular values of Euclidean distance matrices from measured ranges, faulted satellites can be isolated and excluded.
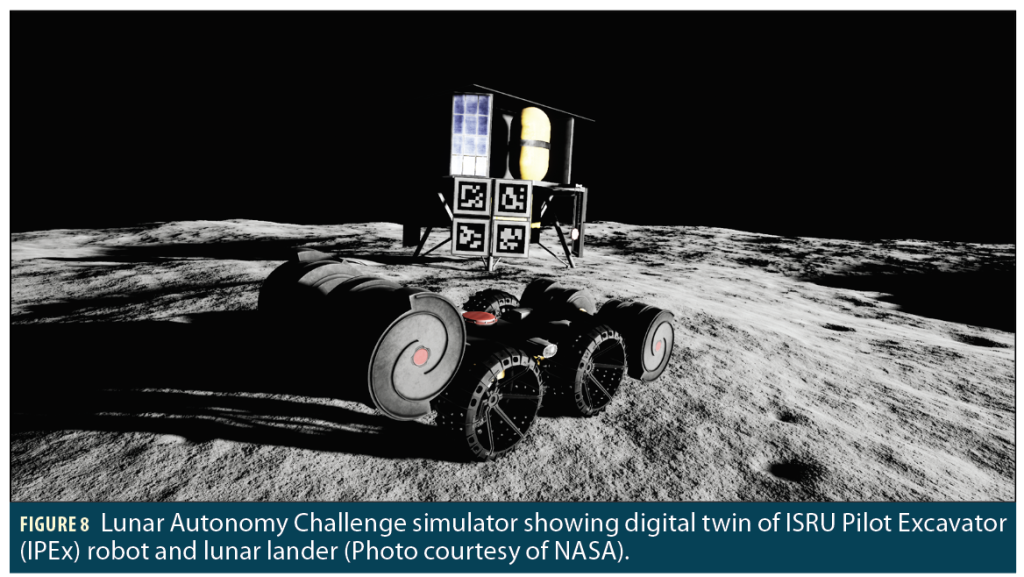
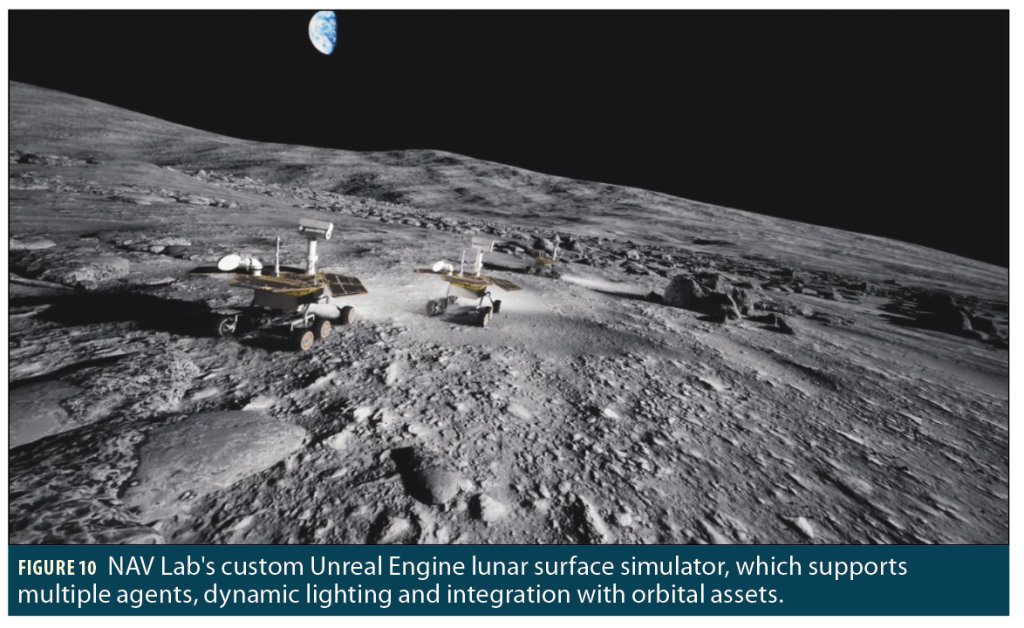
Mapping and Path Planning for Lunar Rovers
Lunar rovers face hazardous, unstructured terrain and extreme lighting conditions that degrade perception. To advance autonomous navigation, NAV Lab participated in the NASA Lunar Autonomy Challenge managed by APL under the Lunar Surface Innovation Initiative (LSII). The challenge used a high-fidelity simulator (Unreal Engine + CARLA) with realistic rover dynamics and photorealistic lunar terrain. NAV Lab developed a full-stack autonomous agent integrating semantic perception, stereo visual odometry, pose-graph SLAM with loop closures, and hierarchical path planning [14]. The system achieved robust mapping and localization across diverse simulated conditions, culminating in a first-place finish in the final competition evaluation.
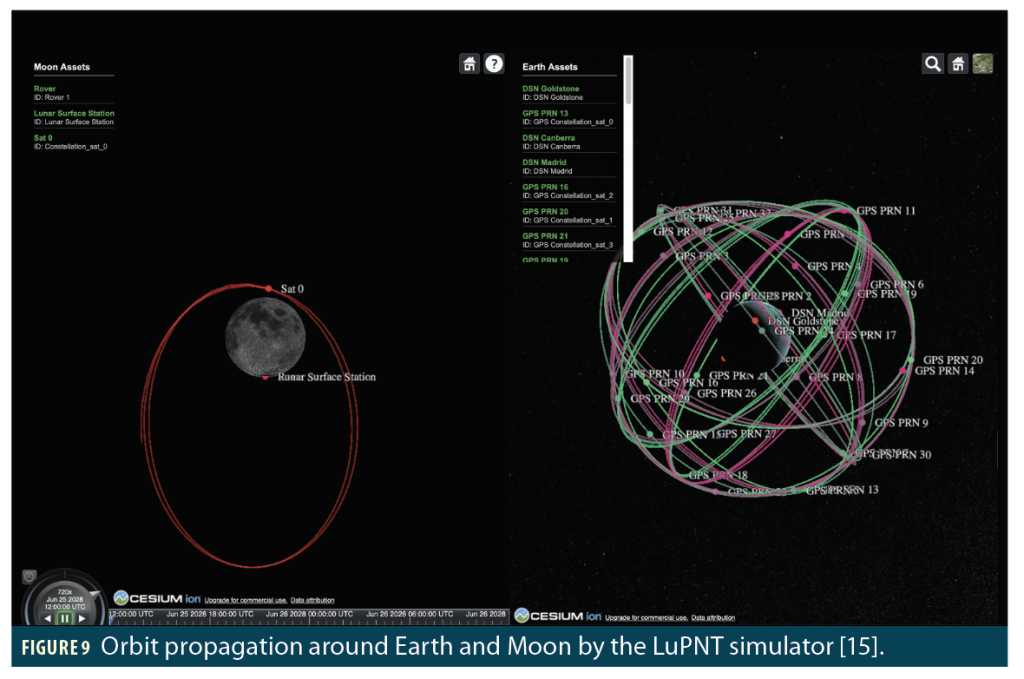
Open-Source Simulator Development (LuPNT)
To support the growing lunar PNT research community, NAV Lab has developed LuPNT, a comprehensive open-source simulation framework [15]. Implemented primarily in C++ for efficiency and with Python bindings for usability, LuPNT integrates astrodynamics, communication, and PNT modules in a unified platform. Key capabilities include ODTS of lunar satellites using GNSS signals, lunar constellation and contact-plan design, inter-satellite link analysis, and surface navigation simulation via Unreal Engine. LuPNT provides a flexible, extensible toolset to accelerate algorithm development and mission design for LunaNet and future lunar PNT systems.
Summary
A reliable lunar PNT system is rapidly becoming a necessity as space agencies and industry plan hundreds of missions to the Moon. NASA, ESA and JAXA are leading with early deployments of interoperable LANS providers under the LunaNet framework, standardized through the LunaNet Interoperability Specification (LNIS). These initial constellations—leveraging elliptical frozen orbits, ground stations, GNSS receivers, and new signal designs—represent the first steps toward a sustainable lunar navigation architecture.
At the Stanford NAV Lab, research is addressing the core technical challenges of this emerging system: orbit determination and time synchronization, ephemeris representation, autonomous fault detection, and rover navigation. Open-source simulation efforts such as LuPNT further support algorithm development and mission design. Together, these deployments and academic innovations are laying the foundation for a robust lunar PNT infrastructure to enable sustained human presence on the Moon. A future column will provide more details on several of these research efforts.
References
[1] D. J. Israel, et al., “LunaNet: a Flexible and Extensible Lunar Exploration Communications and Navigation Infrastructure,” 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 2020, pp. 1-14, doi: 10.1109/AERO47225.2020.9172509.
[2] LunaNet Interoperability Specification, Version 5, February 2025. https://www.nasa.gov/directorates/somd/space-communications-navigation-program/lunanet-interoperability-specification/
[3] LunaNet Signal-in-Space Recommended Standard, February 2025. https://www.nasa.gov/wp-content/uploads/2025/02/lunanet-signal-in-space-recommended-standard-augmented-forward-signal-vol-a.pdf?emrc=0f6993
[4] Sriramya Bhamidipati, Tara Mina and Grace Gao, Time Transfer from GPS for Designing a SmallSat-Based Lunar Navigation Satellite System, Navigation: Journal of the Institute of Navigation. September 2022, 69 (3); DOI: 10.33012/navi.535.
[5] Sriramya Bhamidipati, Tara Mina and Grace Gao, A Case Study Analysis for Designing a Lunar Navigation Satellite System with Time-Transfer from Earth-GPS, Navigation: Journal of the Institute of Navigation. December 2023, 70 (4); DOI: 10.33012/navi.599.
[6] Sriramya Bhamidipati, Tara Mina, Alana Sanchez, and Grace Gao, Satellite Constellation Design for a Lunar Navigation and Communication System, Navigation: Journal of the Institute of Navigation. December 2023, 70 (4); DOI: 10.33012/navi.613.
[7] K. Iiyama, S. Bhamidipati, and G. Gao, Precise Positioning and Timekeeping in Lunar Orbit via Terrestrial GPS Time-Differenced Carrier-Phase Measurements, Navigation: Journal of the Institute of Navigation. March 2024, 71(1); DOI: 10.33012/navi.635.
[8] G. C. Vila and G. Gao, Sensor Fusion for Autonomous Orbit Determination and Time Synchronization in Lunar Orbit, IEEE Aerospace Conference, Big Sky, MT, March 2025
[9] K. Iiyama and G. Gao, Plasmaspheric Delay Characterization and Comparison of Mitigation Methodologies for Lunar Terrestrial GNSS Receivers, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2025).
[10] M. Cortinovis, K. Iiyama, and G. Gao, Satellite Ephemeris Parameterization Methods to Support Lunar Positioning, Navigation, and Timing Services, Navigation: Journal of the Institute of Navigation. December 2024, 71 (4) ; DOI: 10.33012/navi.664.
[11] A. Yang, T. Mina, and G. Gao, Spreading Code Sequence Design via Mixed-Integer Convex Optimization, Navigation: Journal of the Institute of Navigation. September 2025, 72 (3); DOI: 10.33012/navi.706.
[12] K. M. Y. Coimbra, M. Cortinovis, T. Mina, and G. Gao, Single-Satellite Lunar Navigation via Doppler Shift Observables for the NASA Endurance Mission, Navigation: Journal of the Institute of Navigation. September 2025, 72 (3); DOI: 10.33012/navi.710.
[13] K. Iiyama, Daniel Neamati, and Grace Gao, Autonomous Constellation Fault Monitoring with Inter-satellite Links: A Rigidity-Based Approach, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2024), Baltimore, MD, Sep 2024.
[14] A. Dai, A. Wu, K. Iiyama, G. C. Vila, K. M. Y. Coimbra, A. Carlhammar, B. Wu, and G. Gao, Full Stack Navigation, Mapping, and Planning for the Lunar Autonomy Challenge, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2025), Baltimore, MD, Sep 2025.
[15] G. C. Vila*, K. Iiyama*, and G. Gao, LuPNT: An Open-Source Simulator for Lunar Communications, Positioning, Navigation, and Timing, IEEE Aerospace Conference, Big Sky, MT, March 2025.
Authors
Keidai Iiyama is a Ph.D. candidate in the Department of Aeronautics and Astronautics at Stanford University advised by Prof. Grace Gao. He received his M.E. degree in Aerospace Engineering in 2021 from the University of Tokyo, where he also received his B.E. in 2019. His research is on positioning, navigation and timing of lunar space- craft and rovers, and system designs for lunar navigation systems.
Grace Gao is an associate professor in the Department of Aeronautics and Astronautics at Stanford University, leading the Navigation and Autonomous Vehicles Laboratory (NAV Lab). Her research is on robust and secure positioning, navigation and timing with applications to manned and unmanned aerial vehicles, autonomous driving cars, as well as space robotics.