
Researchers at Carnegie Mellon University have developed a new tactile sensing system that allows quadrupedal robots to carry loose, unsecured cylindrical objects on their backs without the cargo rolling off, even while walking, changing direction, or navigating obstacles.
The technology, called LocoTouch, marks a shift in how robot dogs maintain balance and interact with irregular loads, potentially enabling a new class of robotic assistants capable of handling everyday tasks in real-world environments.
Balancing an object while moving is second nature to humans, who rely on coordinated feedback between muscles and the vestibular system. For robots, the process is far more complicated. They must constantly track both their own gait and the shifting position of an object to correct motion in real time. Until now, quadruped robots have typically relied on rigid containers or mounted boxes to securely hold items, limiting the types and shapes of objects they can transport.
According to the University, LocoTouch replaces these physical constraints with a high-density tactile sensor array mounted flat across the robot’s back. There are no borders, grooves, or mechanical aids to prevent an object from sliding off. Instead, the robot learns to adapt its body to keep the item balanced.
“The tactile sensor consists of a piezoresistive film, sandwiched between conductive electrodes made of conductive fabric,” said Changyi Lin, a Ph.D. candidate in the Safe AI Lab.
“Each sensing unit is housed at the intersection of conductive electrodes, so when the object moves and consequently deforms the piezoresistive film, the change in resistance is detected by the intersecting electrodes.”
This continuous feedback gives the robot real-time information about the load’s position and orientation. Using this data, the robot adjusts its posture and motion to counter any weight shift. Much like a human instinctively leans or tilts a tray to keep a cup from tipping.
Simulation-driven training shows real-world success
 College of Engineering, Carnegie Mellon University – YT
College of Engineering, Carnegie Mellon University – YT
The researchers trained the system using reinforcement learning and more than 4,000 digital twins of the robot, allowing it to experience a vast range of object movements and possible disturbances in simulation.
The team reports that the learned skills transferred directly to the physical robot without additional fine-tuning.
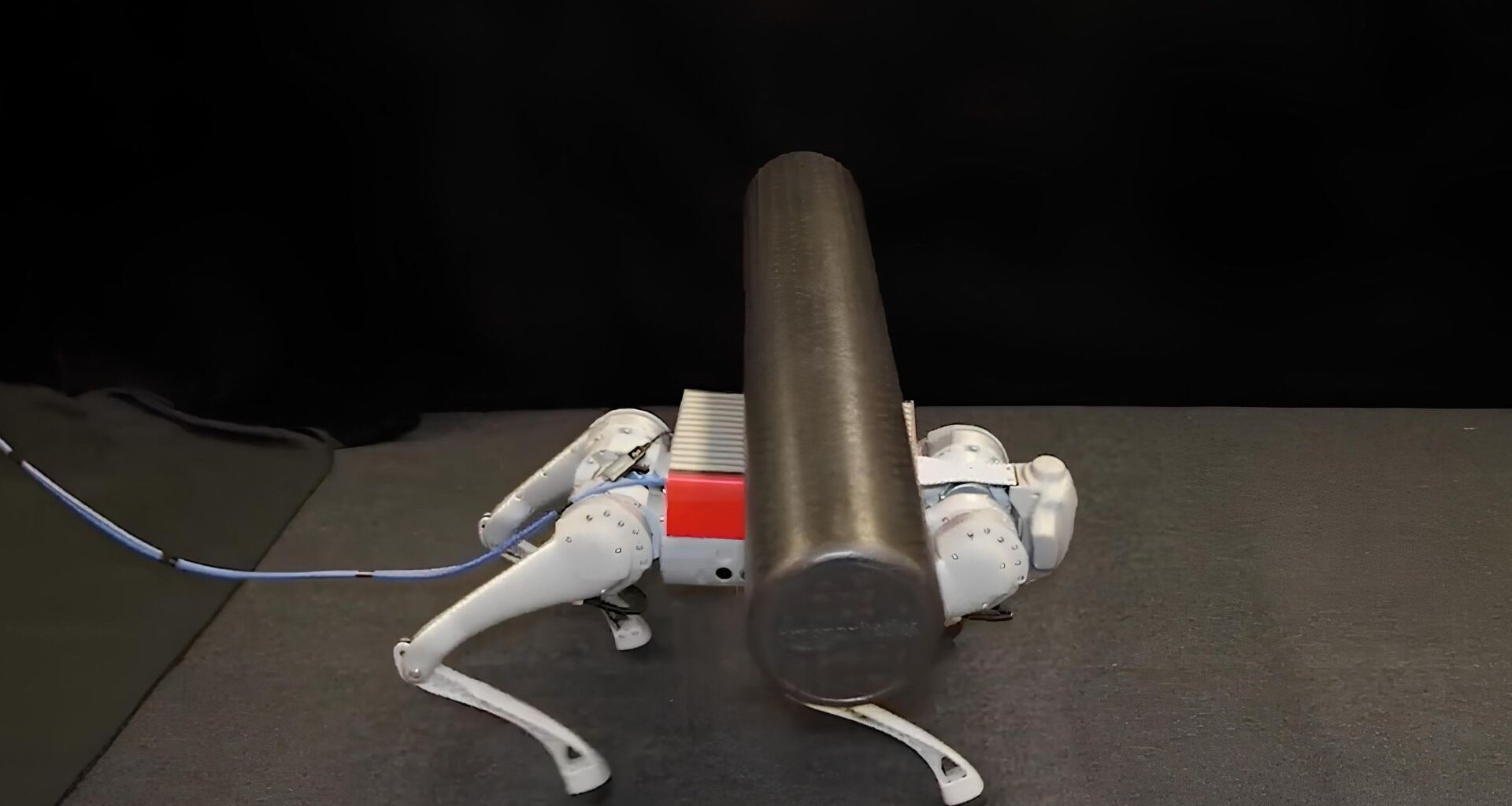
In laboratory demonstrations, the Unitree Go1 quadruped equipped with LocoTouch successfully carried cylindrical objects and items of various shapes for more than 196 feet (60 meters).
It maneuvered around cones, climbed over obstacles, and remained stable even when a person deliberately bumped or shifted the load during the walk.
Toward more capable and adaptable robots
The team describes LocoTouch as the first deployment of tactile sensing on a quadrupedal robot, a step that could broaden how robots work alongside people. “Robots should work for humans, so they need to be able to interact with our environment and perceive our world the way we do,” said Ding Zhao, assistant professor of mechanical engineering.
“With this feedback loop, robots will be capable of more advanced tasks. We are working on scaling the sensors so that they can cover an entire robot, next.”
The researchers believe the technology could eventually support a range of applications, from household robots to industrial and outdoor use. They note its potential to carry sensors into difficult terrain to monitor landslides, assist in hospitals and manufacturing facilities, and even help with tasks like loading and transporting items in trucks.
While still in development, the LocoTouch system demonstrates how tactile feedback can dramatically expand what mobile robots can carry.