
The black ghost knifefish can swim forward, backward, and hover using one long underside fin while keeping its body rigid, according to new research.
The discovery opens a path to a different kind of underwater vehicle – one that could trade propellers for finer control in the places where precise movement matters most.
Long fins of black ghost knifefish

Across high-speed recordings of the black ghost knifefish, the long fin under its body produced moving ripples while the trunk stayed almost perfectly still.
Working at Northwestern Polytechnical University (NPU), Ze-Jun Liang documented how those waves produced thrust and steering without asking the fish to bend its body.
The same fin did not rely on a single fixed pattern, because the fish changed wave direction and wave behavior as its movement changed.
That makes the discovery more than a curiosity of animal motion, and it sets up the deeper question of what, exactly, within the fin makes that control possible.
Stability and steering control
During forward swimming, ripples started near the head and ran toward the tail along the long fin along the belly.
For reverse motion, the pattern flipped, so thrust pointed the other way while the body itself barely flexed. When waves moved toward each other and met, they created a point where opposing forces partly canceled.
Earlier robot work suggests that a similar force-canceling trick can improve stability as well as turning control.
Why rigidity mattered
Keeping the trunk straight mattered for more than smooth swimming, because this species also sensed nearby objects with electricity.
Like other weakly electric fish, it used electrolocation, sensing distortions in its self-generated field, to detect objects in dark water.
A rigid body helps stabilize those signals, which is one reason engineers care about this species as much as biologists do.
That overlap between sensing and swimming makes the fish especially useful for robots carrying cameras, probes, or other delicate hardware.
Black ghost knifefish cruising speed
Speed changed most cleanly when the fin beat faster, not when the overall wave shape changed much.
In the new analysis, wave frequency tracked cruising speed better than wave height or the number of waves on the fin.
Across 32 usable swimming sequences and nearly 2,000 recorded moments, that timing signal stayed the strongest clue to speed.
Robots may benefit because a controller can change tempo more easily than it can rebuild a fin mid-swim.
Sophisticated biological systems
Shape mattered too, because the fin was tallest near the middle instead of holding one flat height.
Its maximum height reached about 24 percent of body height, enough to move water while keeping the body streamlined.
“Our findings show that real biological systems are far more sophisticated,” said Liang. That mismatch helps explain why many prototype fins still look neat on paper but perform less like living fish.
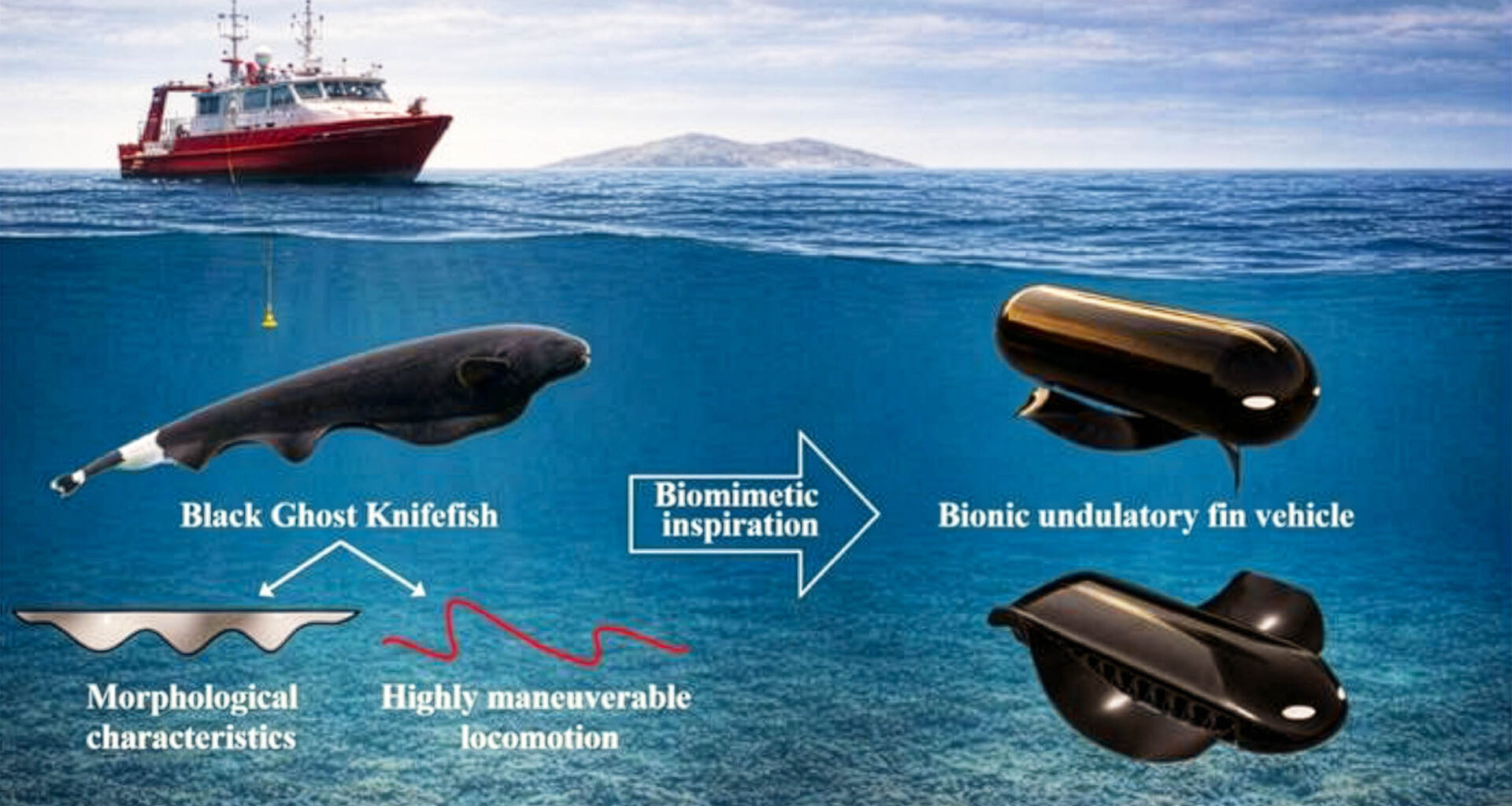
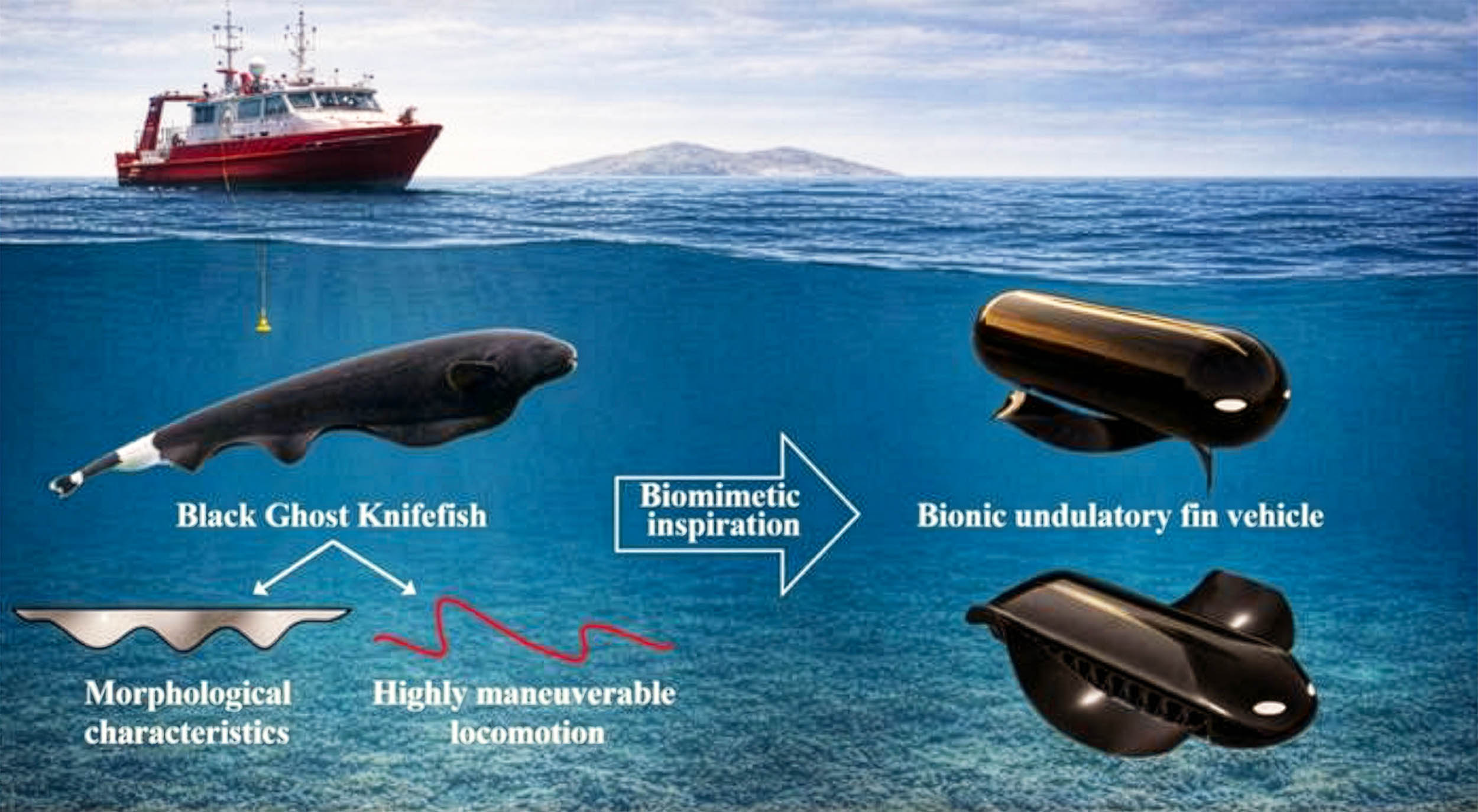 The black ghost knifefish (top) uses its elongated anal fin to generate traveling waves for highly maneuverable swimming. The bio-inspired undulating fin model (bottom) mimics this propulsion mechanism to enhance underwater robot performance. Credit: Ze-Jun Liang. Click image to enlarge.Why propellers struggle
The black ghost knifefish (top) uses its elongated anal fin to generate traveling waves for highly maneuverable swimming. The bio-inspired undulating fin model (bottom) mimics this propulsion mechanism to enhance underwater robot performance. Credit: Ze-Jun Liang. Click image to enlarge.Why propellers struggle
Conventional propellers excel at pushing water backward in open runs, but they lose finesse in tight, slow spaces.
“Traditional propeller-based systems struggle with low-speed maneuverability and stability in complex environments,” said Peng Xu, corresponding author and researcher at NPU’s Ocean Institute.
Robots with long flexible fins attack the problem differently, because small waves can redirect force without asking the hull to swing wide.
That could matter in pipes, reefs, wrecks, or rescue sites where bumps, noise, and tight turns make propellers clumsy.
Robots in murky water
Engineers did not pick this species only for speed, because its body plan also leaves room for onboard sensors.
Earlier review work argued that rigid bodies and long fin propulsion could help robots sense and move in murky water.
That pairing matters because a robot that keeps its sensors steady can map a cluttered space while still making sharp corrections.
Inspection crews and search teams care about exactly that mix of control and awareness when water turns dirty or crowded.
Limitations of the study
As rich as the dataset was, it still came from fish swimming on their own in still water. Turbulence, walls, and sudden obstacles can change the forces on any fin, including one built from this design.
The researchers also worked with a limited set of motion cases, enough for patterns but not every real-world condition.
Any robot copied from the fish will still need testing in currents, tight corners, and messy underwater terrain.
From fish to code
Turning biology into a vehicle now means translating the fin’s moving patterns into control software and hardware.
Future prototypes will need flexible materials, carefully timed motors, and algorithms that switch between one-wave and two-wave motion.
That work follows directly from the team’s plan to build wave-driven robots for turbulent water and confined spaces.
If those parts work together, future submersibles could inspect hard places without stirring as much water or risking a propeller strike.
The new picture of the black ghost knifefish links body shape, wave timing, sensing needs, and steering control into one usable design story.
That story will not replace every propeller, but it gives engineers a sharper starting point for machines that must move carefully underwater.
The study is published in the journal Ocean.
—–
Like what you read? Subscribe to our newsletter for engaging articles, exclusive content, and the latest updates.
Check us out on EarthSnap, a free app brought to you by Eric Ralls and Earth.com.
—–