
Unlock the Editor’s Digest for free
Roula Khalaf, Editor of the FT, selects her favourite stories in this weekly newsletter.
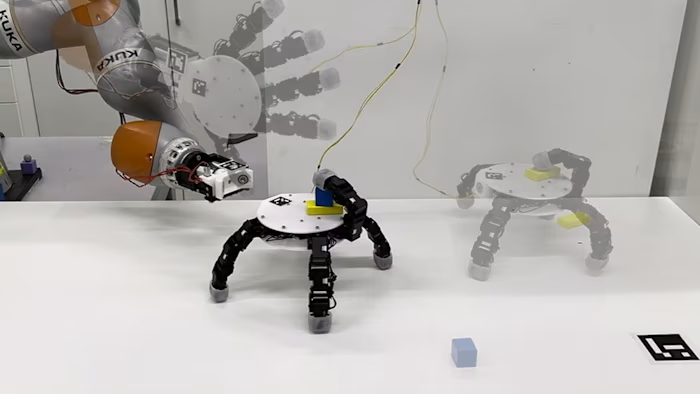
Scientists have developed a detachable robot hand that can crawl and grasp in multiple directions, raising the prospect of uses in industry and beyond that require both small size and motor skills.
The hand’s first notable feature is that it can undock from its host arm to operate independently and approach target objects. It can also carry multiple objects between varying combinations of fingers, researchers said.
The idea of a many-digited automaton that can creep through tight spaces is a staple of dystopian science fiction, but such a machine would potentially have important and less sinister uses.
“While popular culture often associates crawling robots with surveillance imagery, our system is designed for practical manipulation tasks, such as inspection and object retrieval in pipes or machinery,” said Xiao Gao, first author of a paper on the hand published in Nature Communications on Tuesday. “The goal is to design a dual-mode robot that can go beyond human hand dexterity and improve capabilities, not stealth or monitoring.”
The hand is designed to overcome various anatomical restrictions that limit its human counterpart, said Gao, who did the work as a researcher at the Swiss Federal Institute of Technology (EPFL).
The robot is built so that each of its fingers is capable of gripping objects by opposing another. This is more versatile than humans, who are generally capable of only a controlled two-finger grip if one of the pair is the thumb.
The mechanical hand is further capable of grasping on both its front and back sides, in contrast to human fingers, which can grip forwards but not backwards. This enabled it to comfortably pick up more than one object simultaneously and to operate efficiently in “cluttered or constrained environments”, said Gao, who is now an associate researcher at China’s Wuhan University.
In practical terms, this means the robot should be capable of performing operations solo for which a human would need two hands. Examples might include unscrewing a bottle cap or holding a screwdriver and its target object at the same time.
A potential use for the crawling hand could be in industrial monitoring and repair, for which robot dogs such as Boston Dynamics’ Spot are increasingly deployed. An automated vehicle equipped with a robotic arm and the roaming hand could cover large areas to retrieve foreign objects or use simple maintenance tools, Gao suggested.
The invention was reminiscent of Thing T Thing, the disembodied hand in The Addams Family that performs various household tasks, noted Digby Chappell, an associate professor at the Oxford Robotics Institute. The research was “fun and provocative”, he said, adding that there was likely to be “some world where prosthetic hands could take on a form like this”.
“While it isn’t breaking any crawling speed records any time soon and this isn’t the first robot that can both crawl and grasp, it’s definitely pushing the boundary of what we think that robot hands should be able to do,” said Chappell. “There’s a lot of utility in robots that are versatile enough to move around, grasp and interact with the environment.”