

The team from the Korea Advanced Institute of Science and Technology (KAIST) built the rover to address one of the key challenges in lunar exploration, accessing and exploring uncharted cave systems, which could one day serve as safe zones for human activity.
The robot’s unique design focuses on mobility, adaptability, and shock absorption, combining structural strength with flexibility, has proven its resilience through a series of intense Earth-based tests that simulate the Moon’s extreme conditions.
Cave-ready Wheels Inspired By Kinetic Motion
The rover’s most distinct feature is its helix-patterned wheels, composed of interwoven metal strips that function like a piece of kinetic art. These wheels can expand from nine to 19.6 inches in diameter, allowing the rover to adjust its footprint based on terrain. When expanded, the wheels improve weight distribution and traction, making the robot better suited for the Moon’s dusty and uneven surfaces.
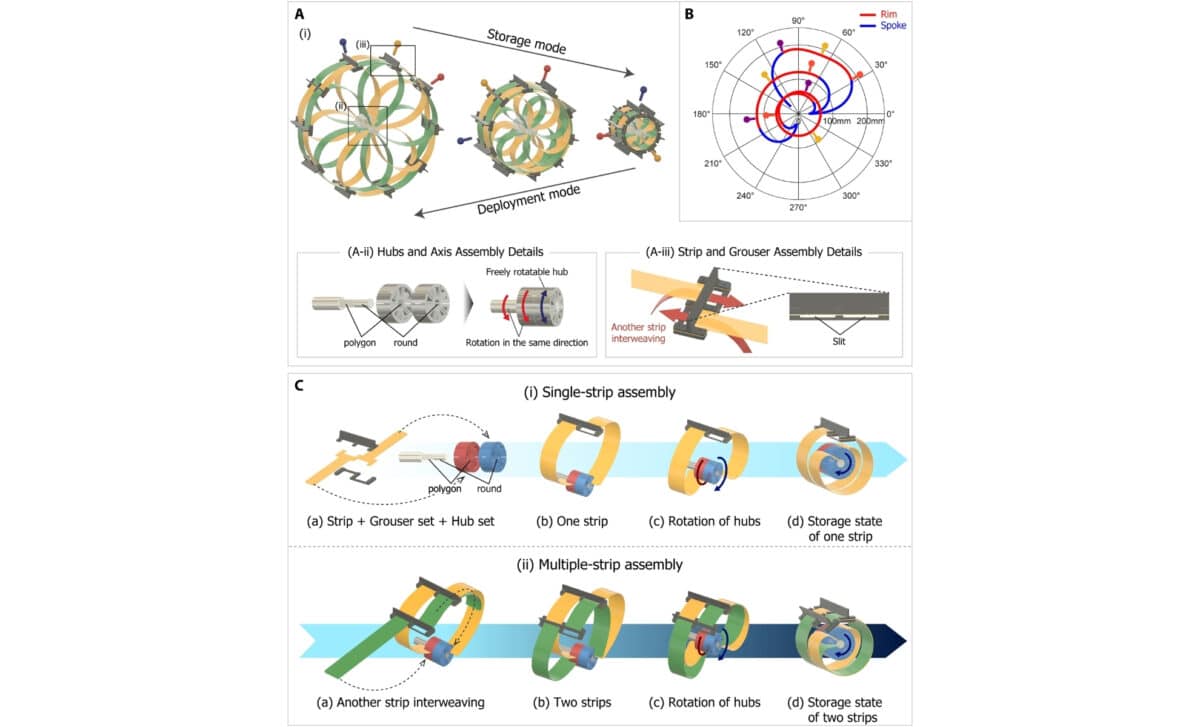 Geometrical description of the wheel structure and coiling mechanism – © Science Robotic
Geometrical description of the wheel structure and coiling mechanism – © Science Robotic
This approach differs from previous models using hinges or origami-inspired folds, which, according to the researchers cited in Science Robotics, are more vulnerable to surface hazards. The expandable design not only increases stability but also allows the rover to fit through narrow passages in its compact state, critical for accessing lunar pits and subterranean environments.
Tested On Rocky Terrain, Dropped From The Air, Blasted With Fire
To demonstrate the wheel system’s resilience, the team subjected the prototype to a wide range of environmental and mechanical stress tests. These included climbing over obstacles up to 200 millimeters (7.8 inches) high, navigating lunar soil simulants, and surviving drop impacts equivalent to a 100-meter (328 feet) fall under lunar gravity.
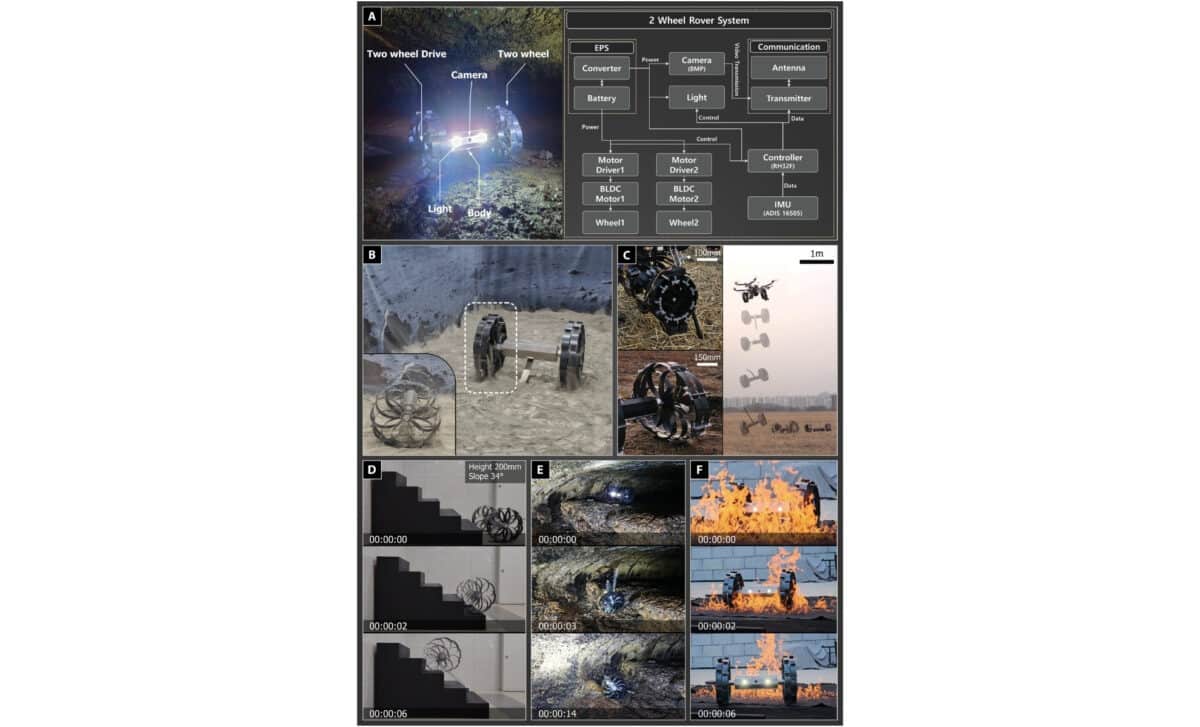 Field testing of the two-wheeled dummy rover equipped with soft deployable wheels was conducted for performance evaluation in extreme conditions – © Science Robotic
Field testing of the two-wheeled dummy rover equipped with soft deployable wheels was conducted for performance evaluation in extreme conditions – © Science Robotic
In another round of trials, the rover was dropped from a drone, exposed to fire, and blasted with cold, replicating the harsh and sudden temperature fluctuations expected on the Moon. The wheels, made from lightweight carbon steel, remained elastic and intact throughout, absorbing shocks and maintaining functionality. As stated in the published study, “the wheel could absorb impacts and navigate uneven terrain while remaining robust under extreme lunar conditions.”
Future Mission Concept: Swarm Deployment Into Lunar Pits
Looking ahead, the research team envisions a multi-rover mission setup, where a larger carrier rover transports several of these compact explorers to the rim of a lunar pit. Once there, the large rover would deploy the smaller units, which would then use their deployable wheels to descend into the caves and explore the interior.
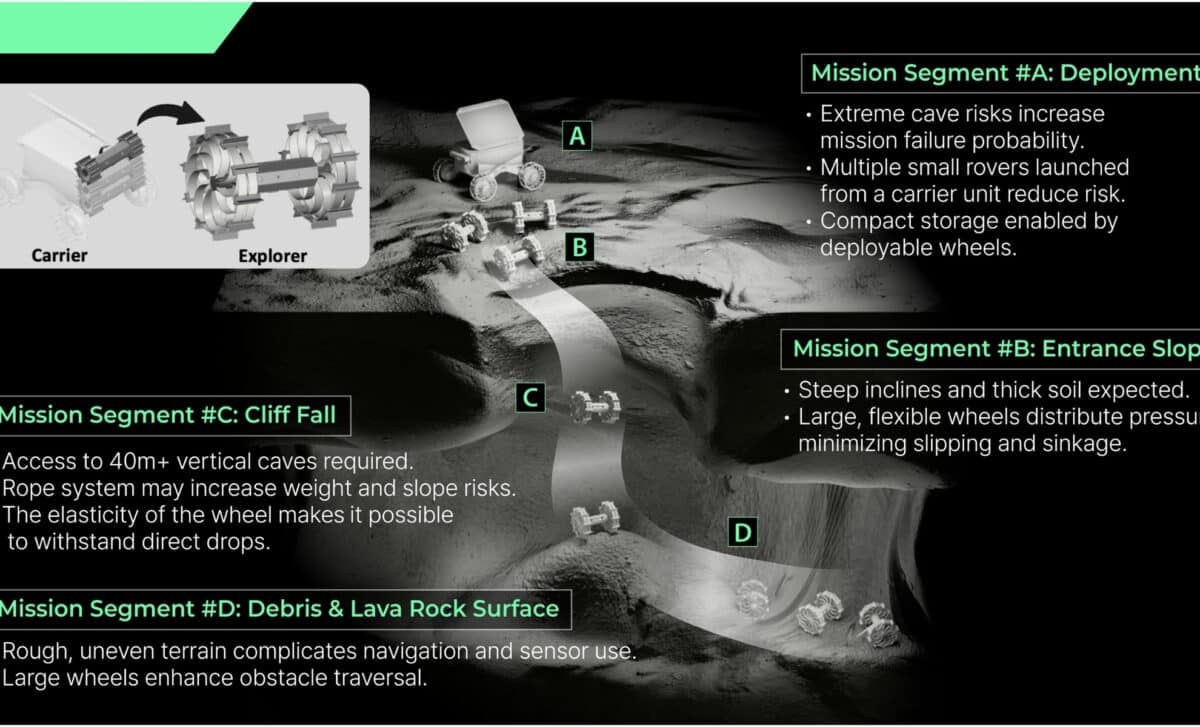 A mission scenario was proposed for entering and exploring lunar pits, and the four key operational segments necessary for its implementation are described – © Science Robotic
A mission scenario was proposed for entering and exploring lunar pits, and the four key operational segments necessary for its implementation are described – © Science Robotic
The wheels’ elasticity and ability to absorb impact would play a key role during the initial drop, allowing the small rovers to land safely and continue operations without damage. The study explains that while the explorers stay compact during stowage, the wheels’ large expanded diameter “is expected to increase the ground contact area, thereby improving traction on thick dust and uneven slopes.”